Vehicle Dynamics Library Expands Truck Modeling Capabilities

Heavy-duty truck features expanded based on customer-driven requirements. Available in Vehicle Dynamics Library 3.4
In the 2019.2 release of Vehicle Dynamics Library (VDL), a number of updated components for modeling and simulating heavy-duty trucks are introduced. This includes new chassis-level experiment templates and new vehicle-level templates.
Because heavy-duty trucks can have up to 5 axles, with either single or dual mounted wheels, a different set of templates and interfaces for setting up a model is essential. In addition to offering chassis tests with specific truck experiment templates, VDL users now have the ability to do vehicle tests without adding new templates.
Vehicle-level Templates
With VDL 3.4 it’s possible to build vehicle-level models of trucks, including powertrains and brake systems.
There are two vehicle templates available for trucks, one for conventional trucks which has the engine and transmission on the top level and one with a bundled powertrain component, which is well suited for electric or hybrid powertrains. These templates leverage vectorized hubs to maximize flexibility when changing axle configurations.
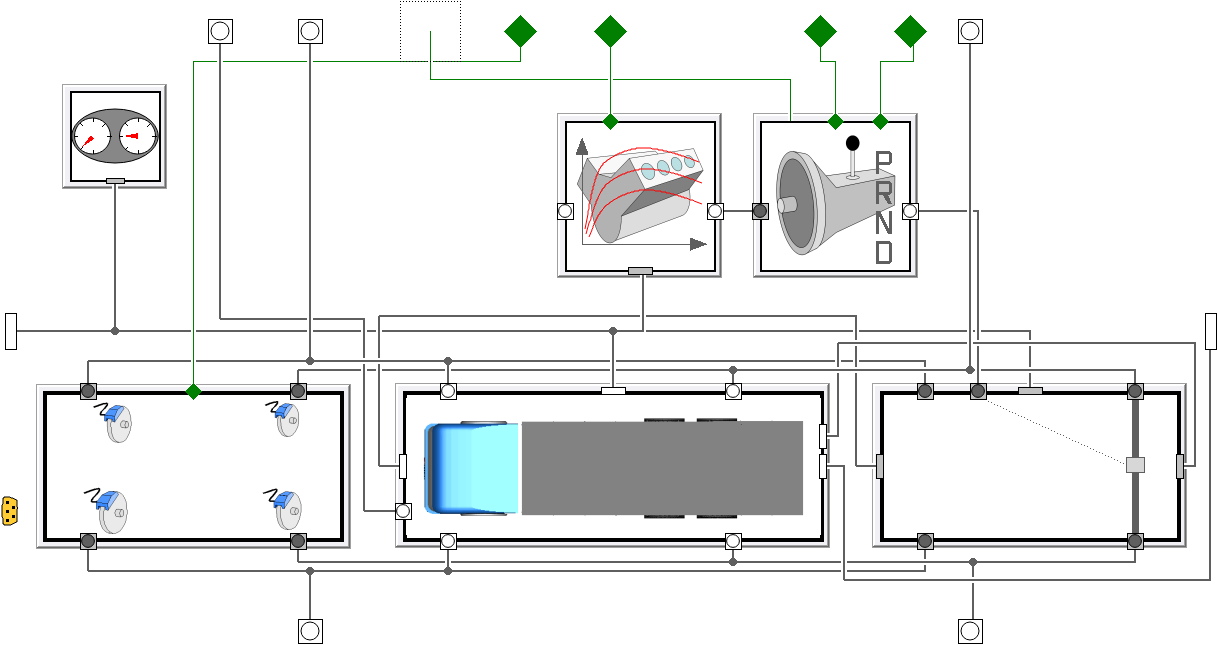
An example model is included that contains a new example 12-speed gearbox as well as brake and driveline components and a truck parameterized tabular engine. This uses the conventional truck template that has separate engine, gearbox and driveline components at the vehicle-level.
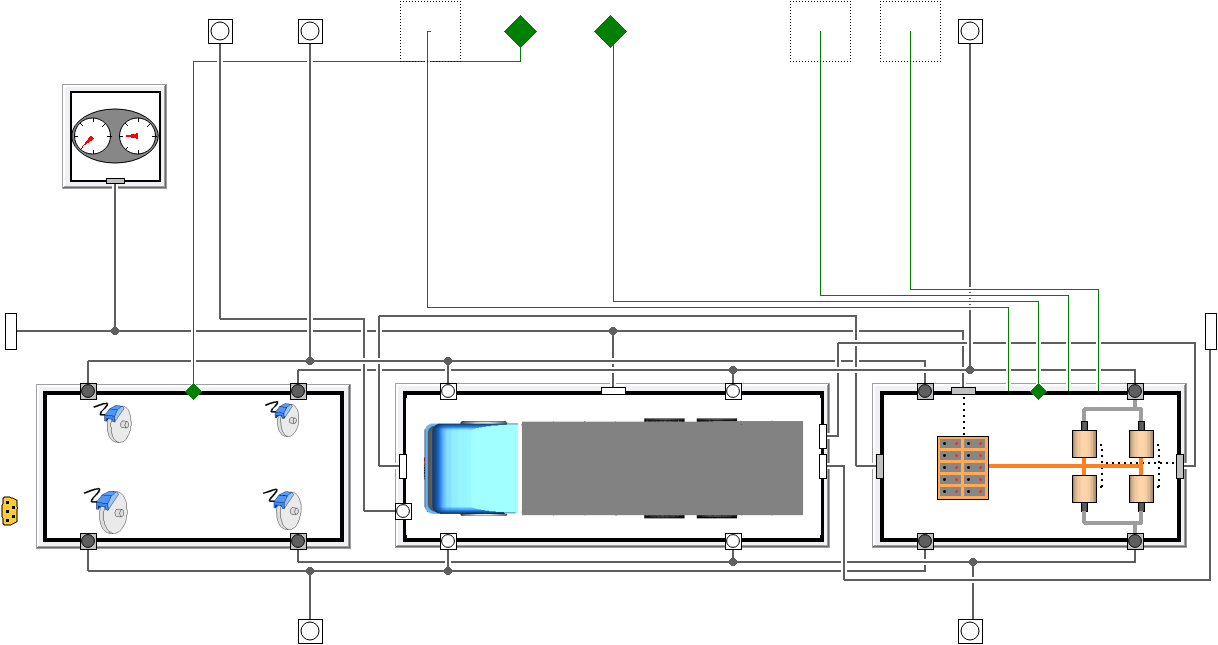
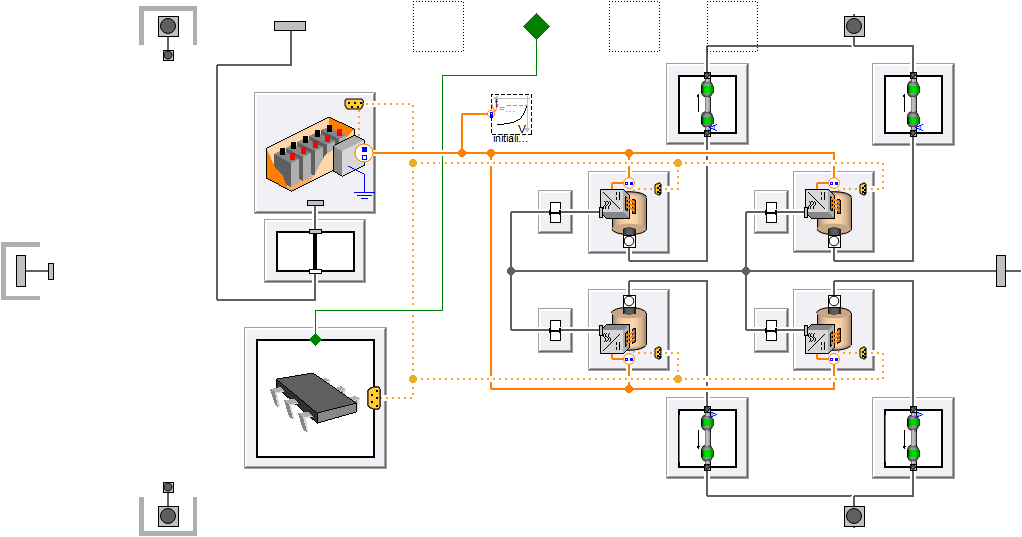
With the bundled powertrain component, we can also study electric powertrains in a straightforward way. Combining VDL and Modelon’s Electrification Library allows us to include batteries, motors and controllers for electric powertrains.
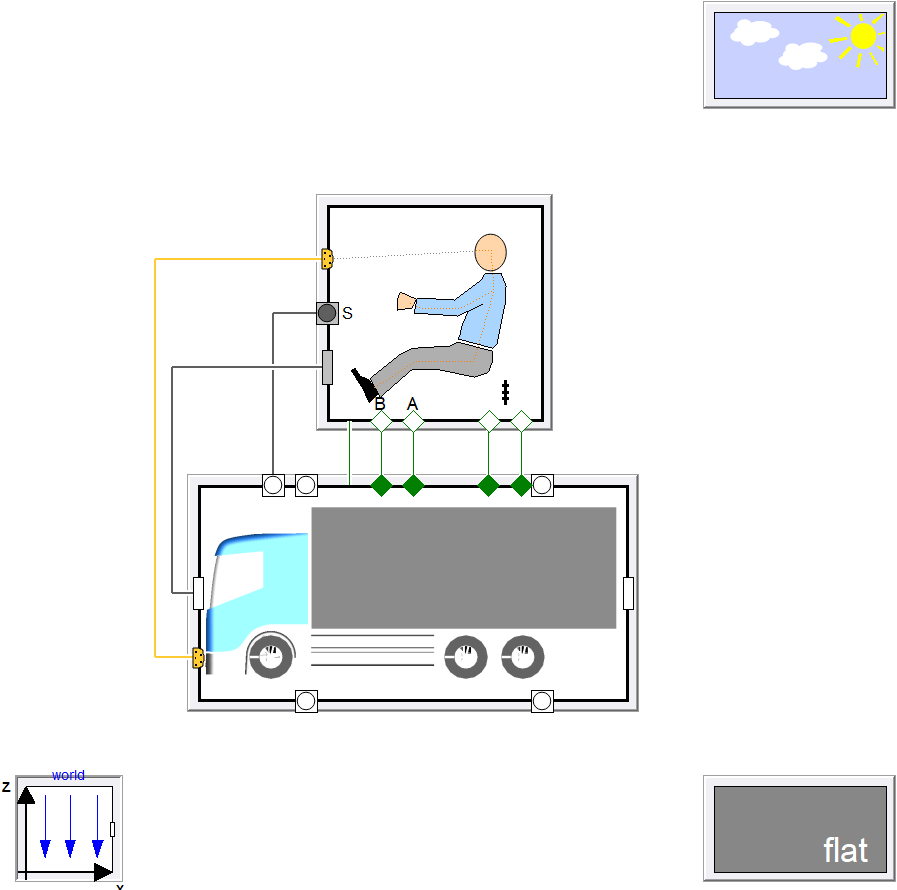
The base interface for these new truck models is the same for passenger cars which allows us to use all available driver models and experiment templates available. This includes fully closed loop driver models with both lateral and longitudinal control as well as open loop drivers where steering wheel, shift and pedal inputs are driven from source blocks.
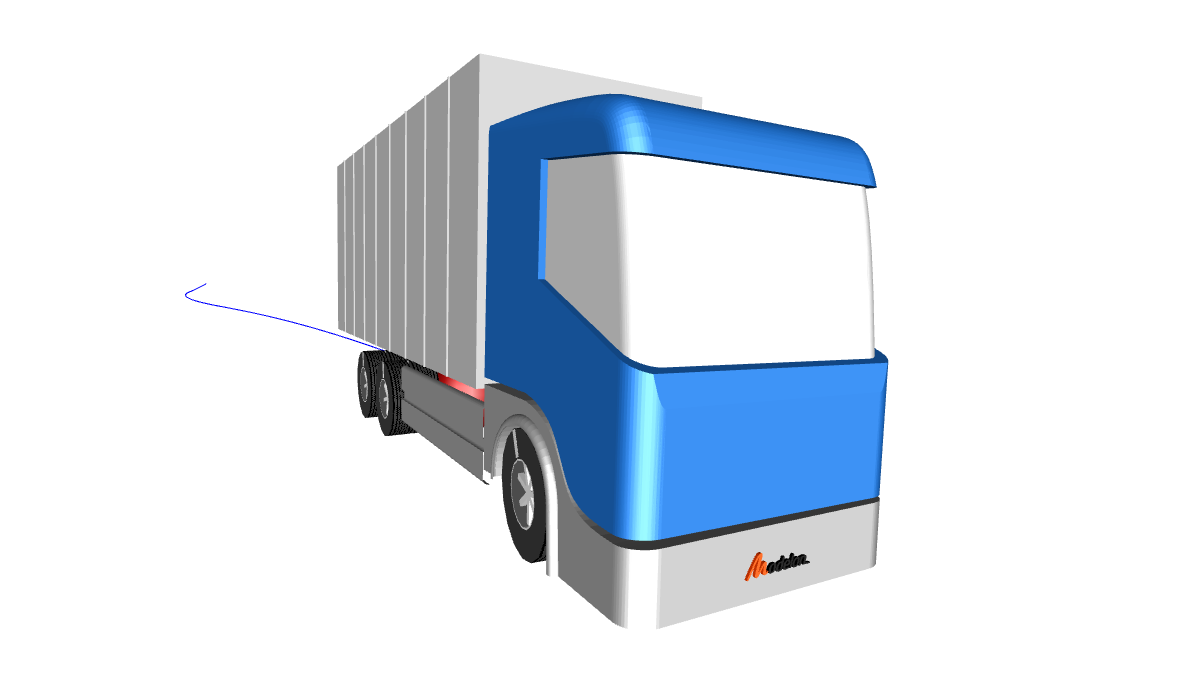
Below is an example closed loop double-lane change maneuver that gets the trailer close to roll-over. Yellow tires indicate that they loose contact with the ground.
Chassis-level Experiments
The experiment templates for truck chassis have been expanded to include velocity control in addition to steering. A truck can be set up to track a specific velocity profile while controlling the steering input. The velocity controller can be set up with torque distributions specific to acceleration or braking. Therefore, drive torque can go to only the rear axles while braking is distributed to all axles.
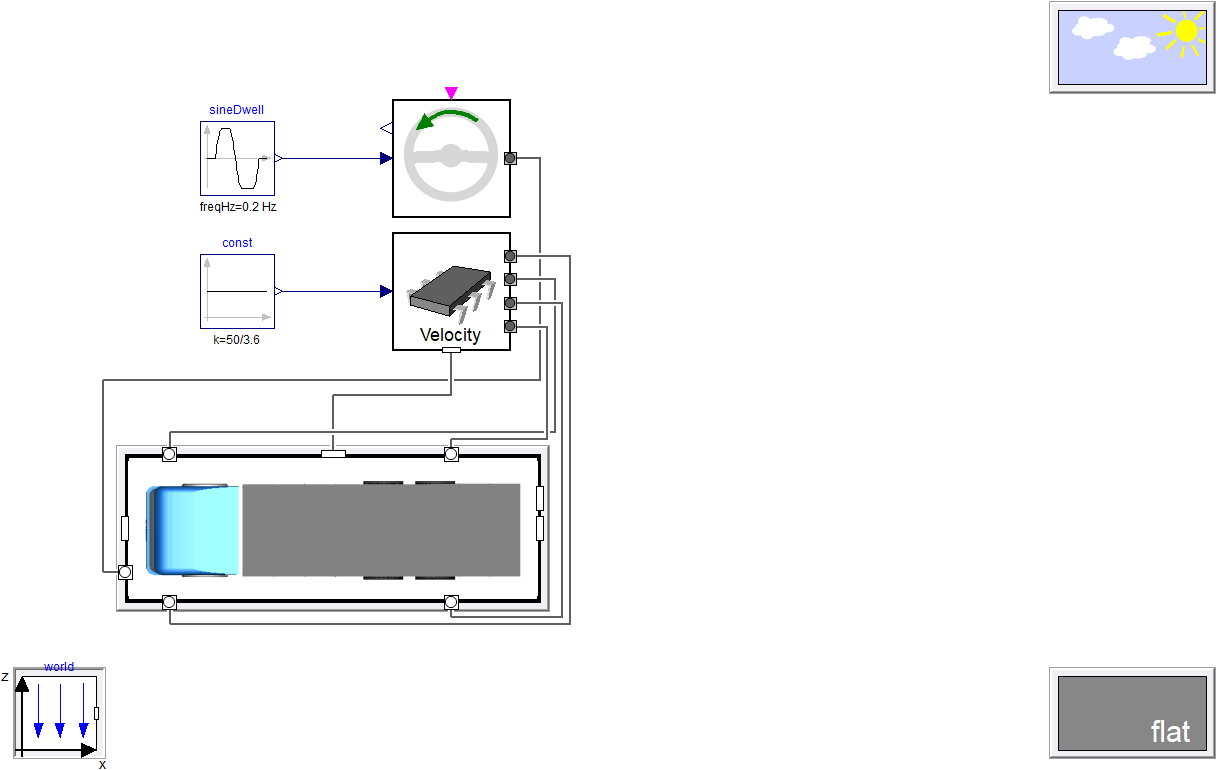
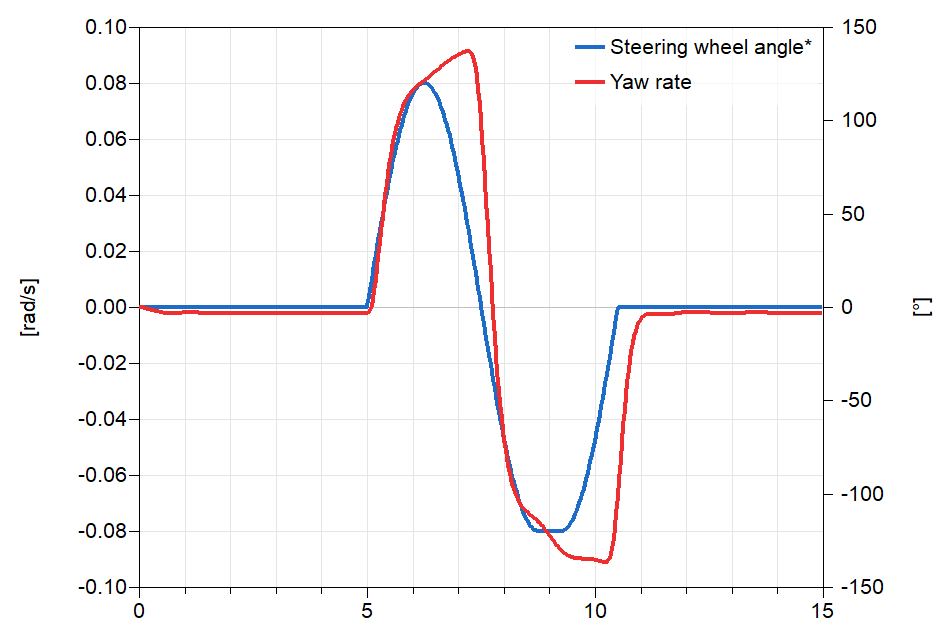
Many standard test cases specify an open-loop steering input and a constant velocity which are now simple to set up using VDL. Shown below is a Sine with dwell maneuver with a 6×2 truck chassis. This test is designed to trigger oversteer and is therefore run on low friction to eliminate the risk of roll-over.
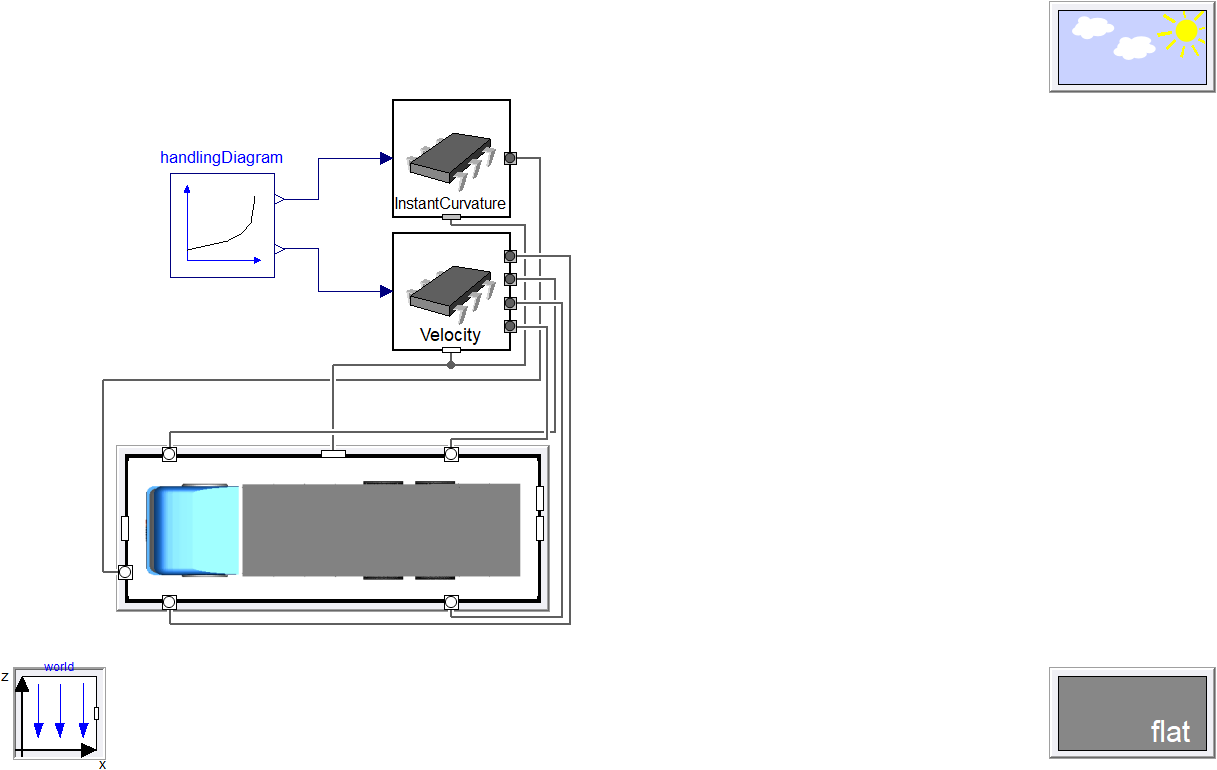
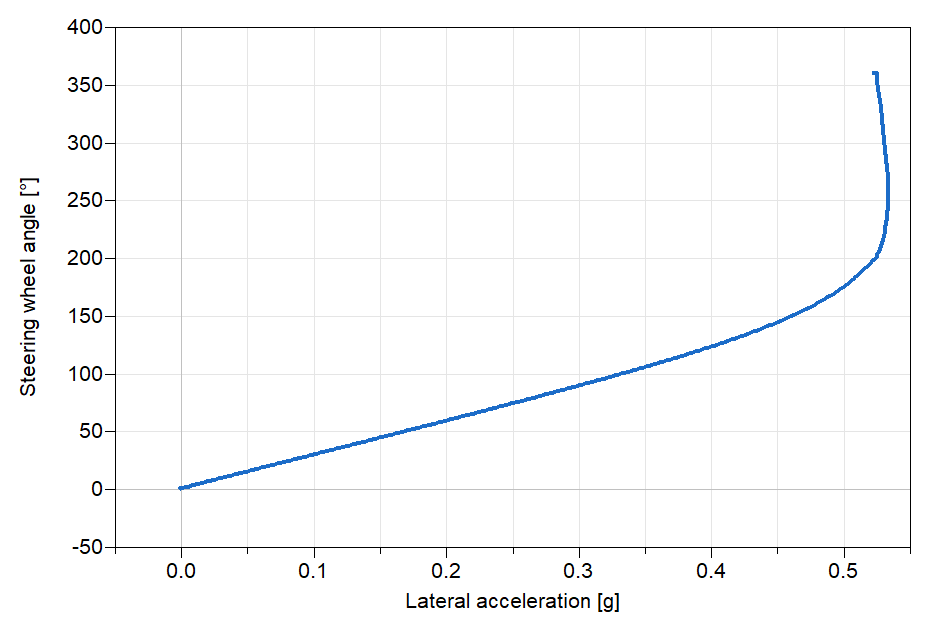
Another standard test case is the handling diagram. This relates steady-state lateral acceleration to steering wheel angle describing the handling characteristics of the vehicle related to under and oversteer. With VDL 3.4 a handling diagram experiment for truck chassis is introduced. This is based on the velocity controller mentioned above as well as the same curvature controller used for the passenger car handling diagram experiment. Below, a handling diagram experiment is shown where we run a constant speed of 50km/h and increase the steering wheel angle.
In addition to the new features presented above the Vehicle Dynamics Library contains several options for truck suspensions including both dependent and independent topologies. There are also examples of the most common trailer configurations, different air spring options and cabin suspensions.


