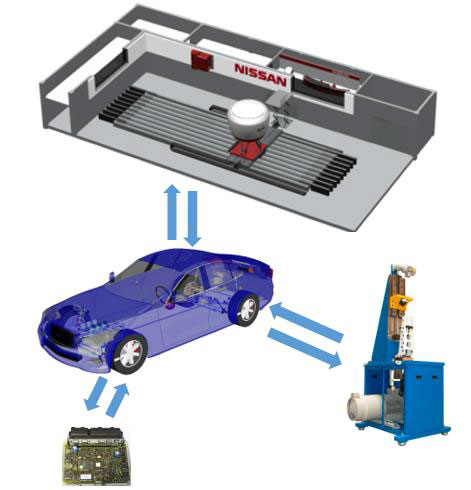
Virtual Vehicle Kinematics and Compliance Test Rig
SUNDSTRÖM, P., HENNINGSSON, M., AKUTAIN, X., HIRANO, Y., ET. AL:
MAY 23, 2016
Japanese Modelica Conference 2016, Tokyo, Japan
Introduction
Virtual representations that can predict a vehicle’s real life behavior have become more and more important in the development process. There are some well-known reasons for this, such as overcoming the cost, time, safety and repeatability issues with physical prototypes (Rauh, 2003).